Casa
>
Prodotti > Modulo telemetro laser > 1064nm designatori target laser > 45mj Laser Target Designator (Ltd) Wiht LRF




 Wiht LRF")
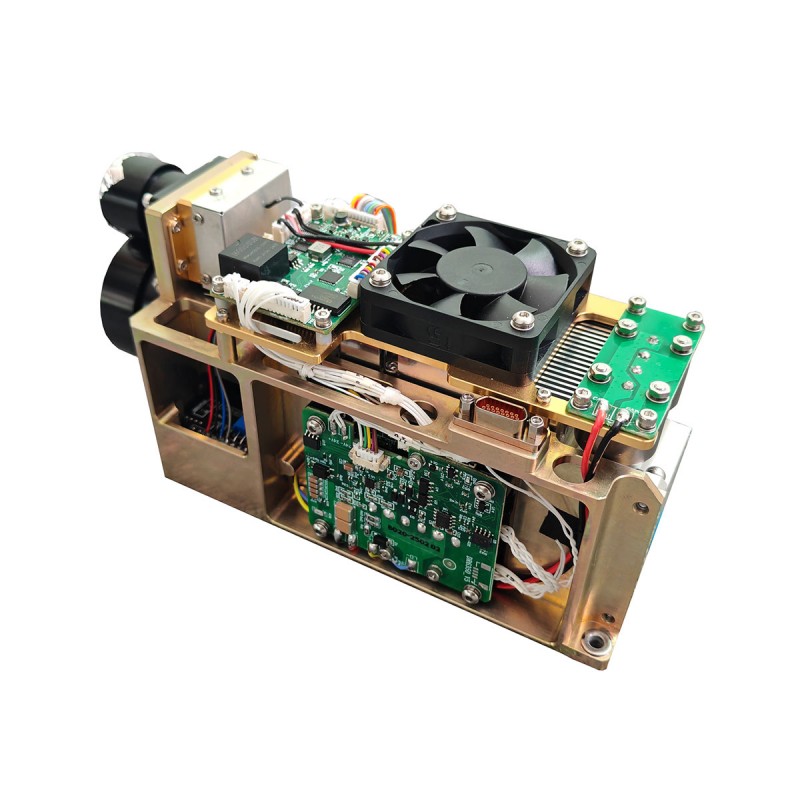
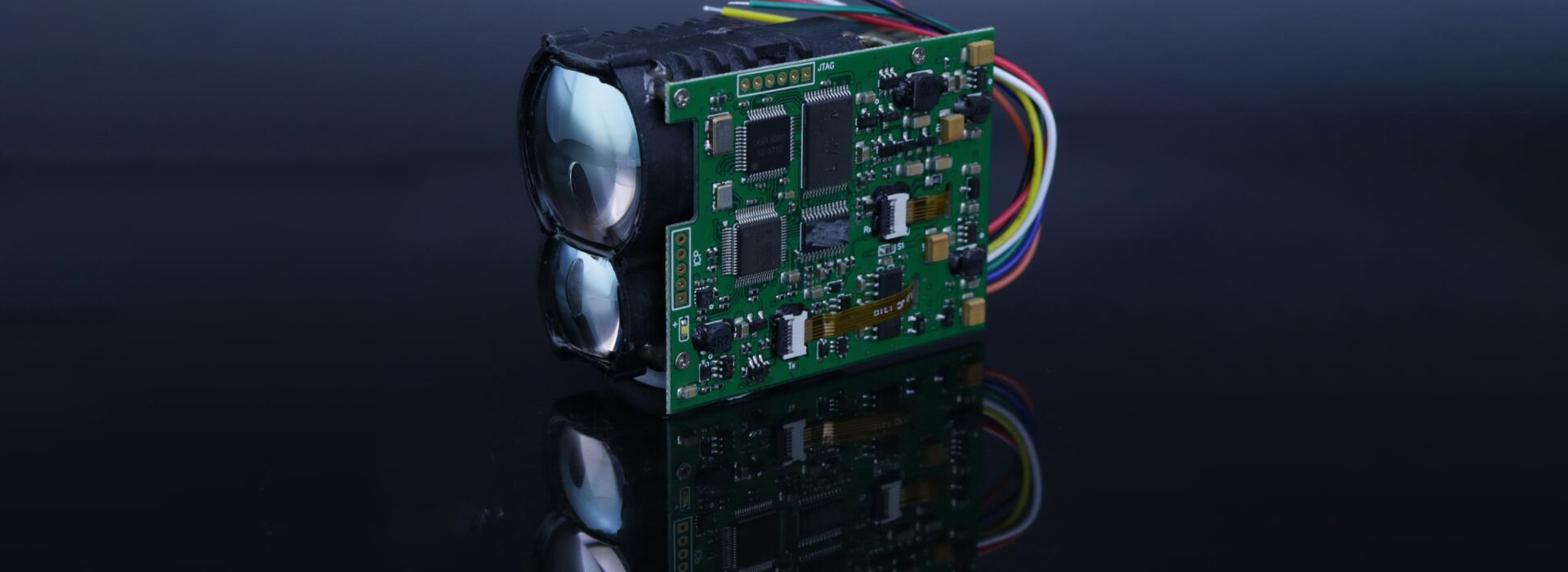
45mj Laser Target Designator (Ltd) Wiht LRF
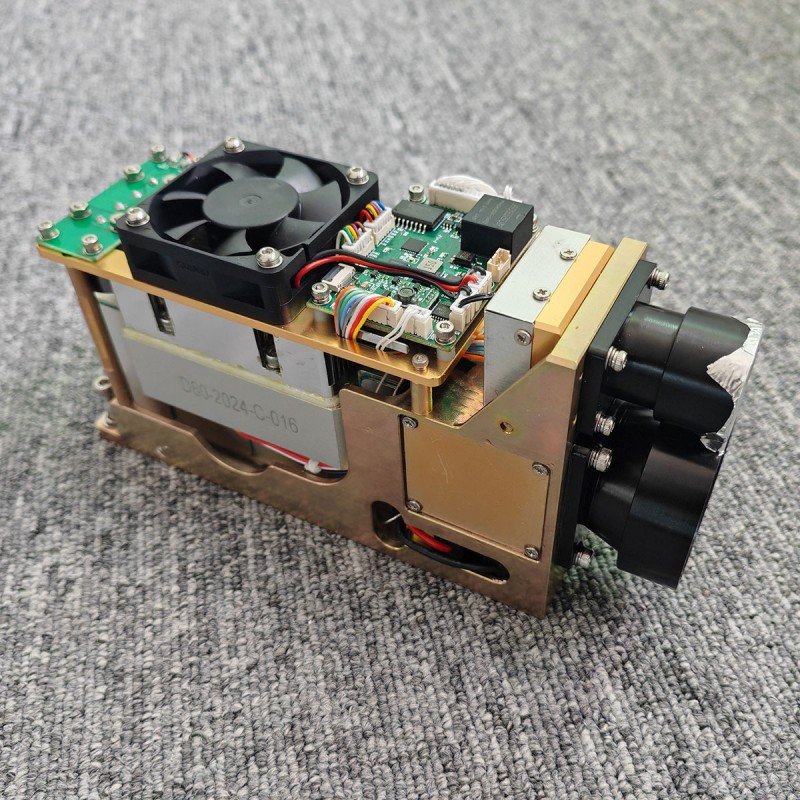
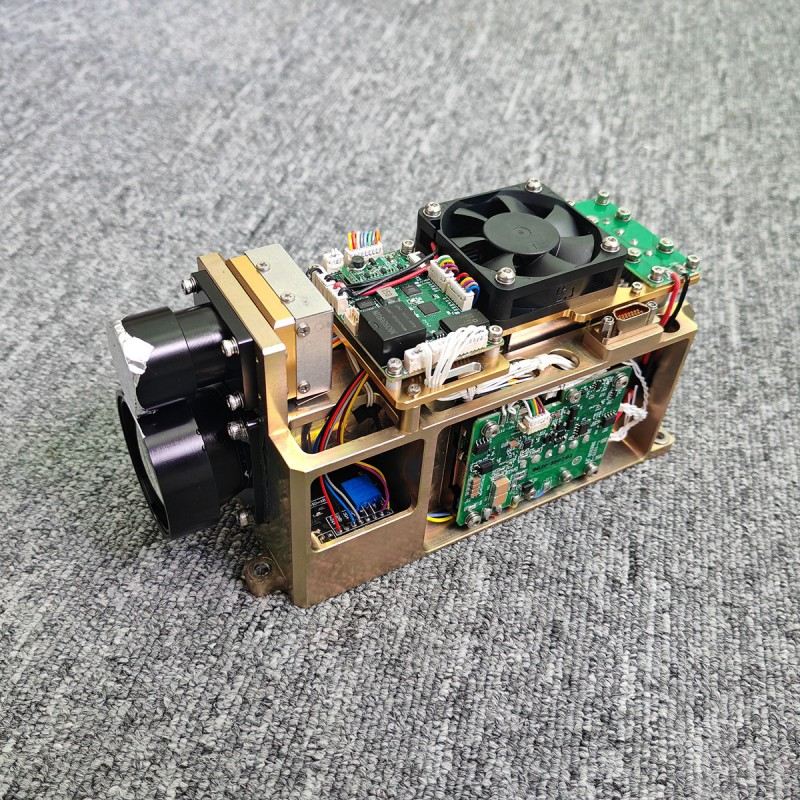
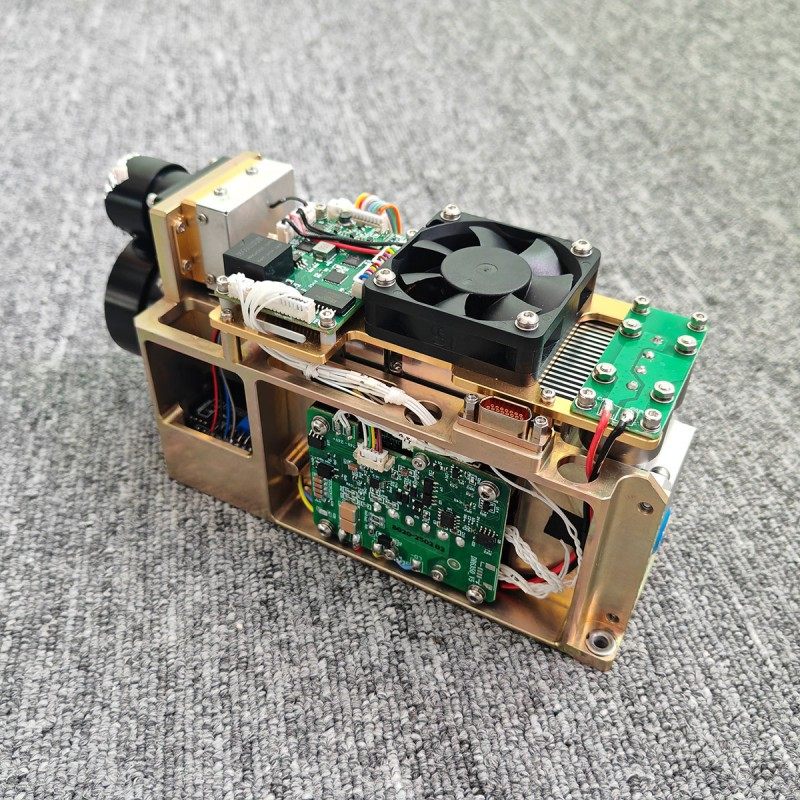
STA-B45M è un desigatore target laser militare da 45 MJ che svolge un ruolo cruciale nei sistemi di mira di precisione, in grado di fornire una guida precisa per le munizioni intelligenti. Attraverso un sistema ottico avanzato, segna il bersaglio con un raggio laser, garantendo che le armi guidate dalla precisione possano distruggere il bersaglio con precisione ed efficienza estremamente elevata.
Invia richiesta
Descrizione del prodotto
Caratteristiche del prodotto
Leggero e miniaturizzato
Adattabilità ambientale: -40 ℃ ~ 60 ℃ Adattabilità a temperatura larga
Adattabilità ambientale: -40 ℃ ~ 60 ℃ Adattabilità a temperatura larga
Parametri dell'indicatore principale
Funzione
a) Ha la funzione di impostazione del ciclo di irradiazione e può eseguire irradiazione laser secondo il ciclo set.
b) dotato di funzioni di portata singola laser e ripetute.
c) dotato di funzione di distanza multi-target.
d) dotato di funzione di uscita della temperatura per i componenti core della fotocamera.
e) dotato di funzione di protezione surriscaldante per il dispositivo di misurazione.
f) dotato della funzione di uscita le informazioni sullo stato del dispositivo di illuminazione.
a) Ha la funzione di impostazione del ciclo di irradiazione e può eseguire irradiazione laser secondo il ciclo set.
b) dotato di funzioni di portata singola laser e ripetute.
c) dotato di funzione di distanza multi-target.
d) dotato di funzione di uscita della temperatura per i componenti core della fotocamera.
e) dotato di funzione di protezione surriscaldante per il dispositivo di misurazione.
f) dotato della funzione di uscita le informazioni sullo stato del dispositivo di illuminazione.
Parametri tecnici
| Modello | STA-B6445M |
| Lunghezza d'onda laser | 1.06um (utilizzando ND: YAG Crystal, Garanzia di selezione del design) |
| Energia media laser | ≥ 45mJ (fluttuazioni energetiche ≤ ± 8%); |
| Angolo di divergenza laser | 0,5 mrad |
| stabilità dell'asse ottico di emissione laser | ≤ 0,05 mrad |
| L'asse ottico di emissione laser e l'installazione del piano di base non è parallela | ≤ 3 '(garanzia di design); |
| Larghezza dell'impulso laser | 10ns ~ 22ns |
| Max Ranging | Visibilità ≥ 12 km, intervallo massimo per la misurazione di target NATO ≥ 6 km; |
| Mini che si estende | 100 m |
| Frequenza ripetuta a distanza | 1Hz/5Hz/singolo |
| Precisione a distanza | ≤ ± 2m (RMS) |
| precisione a distanza | ≥ 98% |
| Risoluzione a distanza | ≤ 50m |
| Tempo di lavoro a distanza continua | 5min (5Hz: lavoro continuo 5min, riposo ≤ 3min, può continuare a variare). |
| Distanza massima di irradiazione | ≥ 5 km |
| Distanza minima di irradiazione | ≤ 500 m (con la valutazione del sistema) |
| Ciclo di irradiazione continua | 8, ogni ciclo dura 25s, con intervallo di 15s; Dopo 8 cicli, intervallo di riposo ≤ 20 minuti; |
| Periodo di codice laser (impostato per protocollo di comunicazione) | Impostazione della gamma 40 ms ~ 100ms |
| Accuratezza del cronometraggio della codifica laser | ≤ ± 2μs |
| Tempo di avvio laser | ≤3min |
| Funzione di sincronizzazione extra-code | SÌ |
| Temperatura di lavoro: | -40 ~+60 ℃ |
| Temperatura di conservazione | -50 ~+70 ℃ |
| Peso | ≤580g |
| Modulo a te | 138x75x50mm |
| Con funzionalità di misurazione multi-target e restituire tre valore multi-target, con funzione di passaggio selettivo della distanza. Codice di frequenza e codice a intervallo variabile possono essere impostato (impostato per protocollo di comunicazione). | |
Preparazione per l'uso
Verificare se la tensione di alimentazione è compresa tra 18 V e 32 V. Quando la tensione è troppo bassa (inferiore a 18 V), il campo di range potrebbe non comunicare correttamente o indicare "nessuna uscita laser" e quando la tensione è troppo alta (più di 32 V), l'intero illuminatore può essere danneggiato permanentemente. Assicurarsi che la corrente di uscita nominale del sistema di alimentazione sia maggiore di 6a, se è inferiore a questo valore, potrebbe non esserci laser durante il funzionamento. Assicurarsi che la polarità dell'alimentazione sia correttamente collegata, esiste un rischio di danni all'apparecchiatura se la polarità è invertita. Vedere l'Appendice A per le definizioni di prese di alimentazione.
Precauzioni per l'uso
a) Il laser emesso da questo telemetro è un laser a lunghezza d'onda non eact a 1,06 µm, evitare la luce laser diretta agli occhi quando si usa.
b) Quando si regola il parallelismo dell'asse ottico, assicurarsi di bloccare la lente ricevente, altrimenti il rivelatore sarà danneggiato permanentemente a causa dell'eco forte.
c) Questo modulo di gara non è in aria, assicurarsi di utilizzare l'umidità relativa dell'ambiente sia inferiore all'80%e assicurarsi che l'uso della pulizia ambientale e dell'igiene, in modo da non danneggiare il laser.
d) La gamma di Range Finder è correlata alla visibilità atmosferica e alla natura del bersaglio, nel caso di nebbia, pioggia, vento e sabbia ridurrà l'intervallo. Obiettivi come gruppi di foglie verdi, pareti bianche e calcare esposto hanno una migliore riflettività e possono aumentare la gamma. Inoltre, un aumento dell'inclinazione del bersaglio al raggio laser ridurrà l'intervallo.
e) È severamente vietato sparare il raggio laser a bersagli fortemente riflettenti come le pareti di vetro e bianche entro 100 metri per evitare echi forti, che possono causare danni al rivelatore APD.
f) È severamente proibito di scollegare o collegare il cavo mentre è eccitato.
g) Assicurarsi che la polarità di potenza sia correttamente connessa, altrimenti porterà a danni permanenti al dispositivo.
b) Quando si regola il parallelismo dell'asse ottico, assicurarsi di bloccare la lente ricevente, altrimenti il rivelatore sarà danneggiato permanentemente a causa dell'eco forte.
c) Questo modulo di gara non è in aria, assicurarsi di utilizzare l'umidità relativa dell'ambiente sia inferiore all'80%e assicurarsi che l'uso della pulizia ambientale e dell'igiene, in modo da non danneggiare il laser.
d) La gamma di Range Finder è correlata alla visibilità atmosferica e alla natura del bersaglio, nel caso di nebbia, pioggia, vento e sabbia ridurrà l'intervallo. Obiettivi come gruppi di foglie verdi, pareti bianche e calcare esposto hanno una migliore riflettività e possono aumentare la gamma. Inoltre, un aumento dell'inclinazione del bersaglio al raggio laser ridurrà l'intervallo.
e) È severamente vietato sparare il raggio laser a bersagli fortemente riflettenti come le pareti di vetro e bianche entro 100 metri per evitare echi forti, che possono causare danni al rivelatore APD.
f) È severamente proibito di scollegare o collegare il cavo mentre è eccitato.
g) Assicurarsi che la polarità di potenza sia correttamente connessa, altrimenti porterà a danni permanenti al dispositivo.
Definizione di interfaccia
Tabella 1 Definizione di interfacce esterne
Tabella 1 Definizione di interfacce esterne
| Numero d'ordine | Tipo di interfaccia | Pigmento | Definizione | Osservazioni |
| 1 | Definizione dell'interfaccia DB9 | Palma | Rs422 t+ | Interfaccia di comunicazione RS422 |
| 2 | Viola | Rs422 t- | ||
| 3 | Giallo | Rs422 r- | ||
| 4 | Verde | Rs422 R+ | ||
| 5 | Bianco | GND | ||
| 6 | Cenere | Trigger esterno- | Livello rs422 | |
| 7 | Blu | Trigger esterno + | ||
| 8 | Definizione dell'interfaccia di potenza | Nero | VCC+ | DC 18V ~ 32V |
| 9 | Rosso | VCC- |
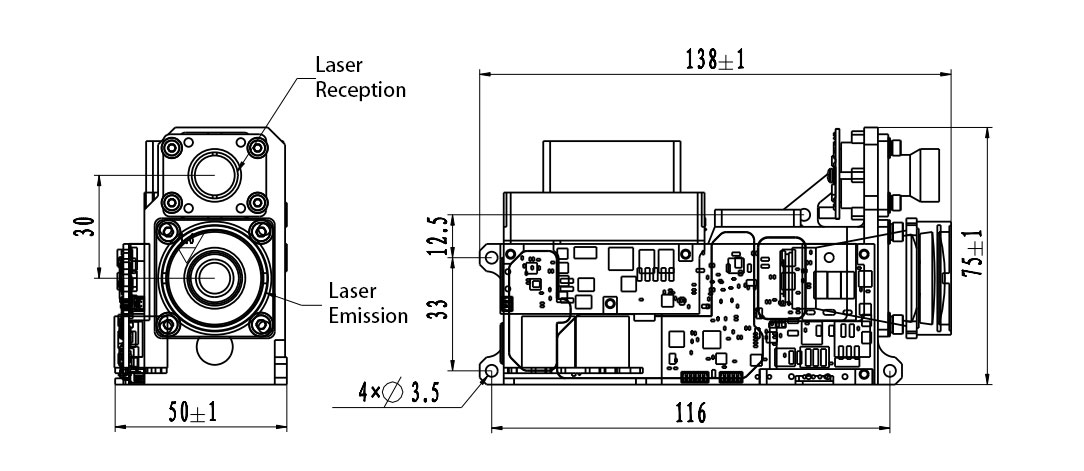
Figura 2 Diagramma di dimensioni bidimensionali del prodotto
Protocollo di comunicazione dell'interfaccia
1. Formato di comunicazione:
a) La velocità di baud predefinita è di 115200 bps.
b) Formato dei dati: dati a 8 bit, un bit di avvio, un bit di arresto, nessun controllo di parità, i dati sono costituiti da byte di intestazione, parte del comando, lunghezza dei dati, parte dei parametri e byte.
2. Modalità di comunicazione:
a) Il master e il dispositivo di misurazione utilizzano la modalità di comunicazione master-slave, in cui il master invia comandi di controllo al dispositivo di misurazione e il dispositivo di misurazione riceve ed esegue le istruzioni. Nello stato di distanza, il dispositivo di misurazione invia i dati e lo stato del dispositivo di misurazione al computer superiore in base al periodo di distanza e il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
b) Dopo che il maestro ha inviato il comando di controllo, il misuratore risponde continuamente con tre comandi di risposta. Se il master non riceve il comando di risposta dal misuratore entro il limite di tempo, lo farà nuovamente nuovamente.
Il formato del messaggio da inviare è il seguente
a) La velocità di baud predefinita è di 115200 bps.
b) Formato dei dati: dati a 8 bit, un bit di avvio, un bit di arresto, nessun controllo di parità, i dati sono costituiti da byte di intestazione, parte del comando, lunghezza dei dati, parte dei parametri e byte.
2. Modalità di comunicazione:
a) Il master e il dispositivo di misurazione utilizzano la modalità di comunicazione master-slave, in cui il master invia comandi di controllo al dispositivo di misurazione e il dispositivo di misurazione riceve ed esegue le istruzioni. Nello stato di distanza, il dispositivo di misurazione invia i dati e lo stato del dispositivo di misurazione al computer superiore in base al periodo di distanza e il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
b) Dopo che il maestro ha inviato il comando di controllo, il misuratore risponde continuamente con tre comandi di risposta. Se il master non riceve il comando di risposta dal misuratore entro il limite di tempo, lo farà nuovamente nuovamente.
Il formato del messaggio da inviare è il seguente
| STX0 | Cmd | Len | Data1h | Data1l | Chk |
Tabella 2 Descrizione del formato del messaggio inviato
| numero d'ordine | nome | spiegare | codice | Osservazioni |
| 1 | STX0 | Flag di avvio del messaggio | 55 (h) |
|
| 2 | Cmd | CW | Vedi Tabella 3 |
|
| 3 | Len | Dl | Il numero di tutti i byte tranne il marchio iniziale, la parola di comando e il checksum |
|
| 4 | Datah | parametro | Vedi Tabella 3 |
|
| 5 | arrivo |
|
||
| 6 | Chk | XOR Verifica | Tranne il byte valido, tutti gli altri byte sono xed |
|
Il comando è descritto come segue:
Tabella 3 Descrizione dei comandi e delle parole dati inviate dal master al contatore
Tabella 3 Descrizione dei comandi e delle parole dati inviate dal master al contatore
| numero d'ordine | CW | funzione | byte di dati | Osservazioni | lunghezza | Codice di esempio |
| 1 | 0x00 | Stop (Stop Ranging Illumination) | D1 = 00 (H) d0 = 00 (H) |
|
Sei byte | 55 00 02 00 00 57 |
| 2 | 0x01 | A distanza singola | D1 = 00 (H) d0 = 00 (H) | Il dispositivo di misurazione riceve un'unica istruzione di distanza, esegue un'operazione di distanza e carica contemporaneamente il valore della distanza di distanza; | Sei byte | 55 01 02 00 00 56 |
| 3 | 0x02 | A distanza continua | D1 = xx (h) d0 = yy (h) | Secondo il periodo di distanza set, il valore della distanza di distanza viene caricato continuamente. I dati esprimono il periodo di distanza e l'unità è MS | Sei byte | 55 02 02 03 E8 BE (1Hz Ranging) |
| 4 | 0x03 | auto-controllo | D1 = 00 (H) d0 = 00 (H) |
|
Sei byte | 55 03 02 00 00 54 |
| 5 | 0x04 | Impostazione della zona cieca | D1 = xx (h) d0 = yy (h) | I dati descrivono il valore della zona cieca, unità 1M e imposta il display a distanza all'interno della zona cieca su 0; | Sei byte | 55 04 02 01 2C 7E (300m è la distanza più vicina) |
| 6 | 0x06 | Numero cumulativo di query di uscita luminosa | D1 = 00 (H) D1 = 00 (H) | Spegnere lo stoccaggio; | Sei byte | 55 06 02 00 00 51 |
| 7 | 0x31 | Imposta il codice preciso | D4 d3 ~ d0 | D4: numero di codice preciso, 8 gruppi integrati, numerati 1 ~ 8; d3 ~ d0 rappresenta il periodo di impulso, unità userrange: 45000 ~ 60000 | Nove byte | 55 31 05 01 00 00 C3 50 F3 (Codice preciso: 1Cycle: 0000C350 = 50000US) |
| 8 | 0x32 | Imposta codici a intervallo variabile | D33 (rif.) D32 (numero di bit di codifica) D31 ~ d30 (intervallo di tempo tra l'ultimo bit 0) d29 ~ d28 (intervallo di tempo tra Bit 14 e bit 15) D27 ~ D26 (intervallo di tempo tra Bit13 Bit14) D25 ~ D24 (intervallo di tempo tra Bit 12 e Bit 13) D23 ~ D22 (intervallo di tempo tra Bit11 D21 ~ D21 ~ D21 ~ D25 (tempo di tempo di tempo (intervallo di tempo tra Bit11) bit10 bit11)D19~D18 (time interval between bit9 bit10)D17~D16 (time interval between bit8 bit9)D15~D14 (time interval between bit7 bit8)D13~D12 (time interval between bit6 and bit7)D11~D10 (time interval between bit5 bit6)D9~D8 (time interval between bit4 bit5)D7~D6 (time interval between bit3 Bit4) D5 ~ D4 (intervallo di tempo tra Bit2 Bit3) D3 ~ D2 (intervallo di tempo tra Bit1 Bit2) D1 ~ D0 (intervallo di tempo tra Bit0 e Bit1) | D33: numero di codice a intervallo variabile, 16 gruppi integrati, l'intervallo di numeri è 1 ~ 16; D32: numero di bit di codifica, che vanno da 3 a 16 volte unità di intervallo USRANGE: 45000 ~ 60000 | 38 byte |
|
| 9 | 0x33 | Impostazione dei codici pseudo-casuali | D4 d3 ~ d0 | D4: codifica del codice pseudo-casuale, con 2 gruppi incorporati, numerati da 1 a 2; D3: lunghezza del codice pseudo-casuale, che va da 2 a 16d2 d1: valore iniziale del codice pseudo-casuale, che viene preso dalla punta inferiore in base alla lunghezza della codifica pseudo-random0: standby, set 0 | Nove byte | 55 33 05 01 10 AA AA 00 72 (Pseudo-Random Codice Numero: 1Pseudo Lunghezza del codice casuale: 16 INDIZIONI INDIETÀ: AAAA) |
| 10 | 0x41 | Imposta la query per i codici di precisione | D1 D0 | D1: numero di codice preciso, l'intervallo di numeri è 1 ~ 8d0: standby, set 0 | Sei byte | 55 41 02 01 00 13Sept La query per il codice di precisione 1 |
| 11 | 0x42 | Imposta la query per i codici a intervallo variabili | D1 D0 | D1: numero di codice a intervallo variabile, l'intervallo di numeri è 1 ~ 16d0: standby, set 0 | Sei byte | 55 42 02 01 00 14SET La query per la codifica variabile 1 |
| 12 | 0x43 | Imposta una query per i codici pseudo-casuali | D1 D0 | D1: numero di codice pseudo-random, l'intervallo numerico è 1 ~ 2d0: standby, set 0 | Sei byte | 55 43 02 01 00 15SET la query con codifica pseudo-casuale 1 |
| 13 | 0x44 | Irradiazione continua Impostazione dell'orario di lavoro | D1 = 00 (H) d0 = YY (H) | YY Il tempo di irradiazione continua si riferisce al tempo di lavoro continuo del contatore in modalità di irradiazione continua, unità s. La fermata automatica verrà fermata dopo il timeout | Sei byte | 55 44 02 00 3C 2fcontinuo di lavoro 60s |
| 14 | 0x45 | Continuous irradiation working time query | D1 = 00 (H) d0 = 00 (H) |
|
Sei byte | 55 45 02 00 00 12 |
| 15 | 0x30 | Irradiazione precisa del codice | D3 ~ d0 | D3: Modalità irradiazione, 00 Irradiazione continua, 01 Irradiazione periodica D2: 01 Codice preciso irradiazioned1: codice preciso numerod0: standby 00 | Otto byte | 55 30 04 00 01 01 00 61Code 1, illuminazione continua di codice preciso |
| Irradiazione del codice a intervallo variabile | D3 ~ d0 | D3: modalità irradiazione, 00 irradiazione continua; 01 Irradiazione periodica D2: 02 Codice intervallo variabile IrradiationD1: Codice intervallo variabile Numberd0: Standby 00 | Otto byte | 55 30 04 00 02 01 00 62Code 1, codice a intervallo variabile Irradiazione continua | ||
| Irradiazione sincrona esterna | D3 ~ d0 | D3: 00 La sincronizzazione esterna è solo illuminationd2: 03 Irradiazione sincrona esternad1: 00d0: 00 | Otto byte | 55 30 04 00 03 00 00 62 | ||
| Irradiazione del codice pseudo-casuale | D3 ~ d0 | D3: modalità irradiazione, 00 irradiazione continua; 01 Irradiazione periodica D2: 04 Codice pseudo-Random IrradiationD1: Pseudo-Random Code Numberd0: Standby 00 | Otto byte | 55 30 04 00 04 01 00 64Code 1, Pseudo-Random Codice Irradiazione continua | ||
| 16 | 0x24 | Impostazione dei parametri di irradiazione periodica | D2 D1 D0 | D2: Numero di cicli di lavoro 1: ora di lavoro per ciclo, unità SD0: tempo di riposo per ciclo, in s | Sette byte | 55 24 03 08 14 0a 64 (8 cicli, 20s e 10 secondi di riposo per ciclo) |
| 17 | 0x25 | Query di parametro di irradiazione periodica | D1 = 00 (H) d0 = 00 (H) |
|
Sei byte | 55 25 02 00 00 72 |
| 18 | 0xeb | Query numero dell'attrezzatura | D1 = 00 (H) d0 = 00 (H) |
|
Sei byte | 55 EB 02 00 00 a.C. |
| 19 | 0x51 | Modalità di debug | D1 D0 | D1: 01 Enter Debug Modalità, 00 Exit Debug Moded0: Standby | Sei byte | 55 41 02 01 00 17Enter Debug Modalità55 41 02 00 00 Modalità debug 16exit |
|
|
|
|
|
|
|
|
a) Il controllo principale riceve il formato
Il formato del messaggio ricevuto è il seguente:
Il formato del messaggio ricevuto è il seguente:
| STX0 | Cmd | Len | Dati | Data0 | Chk |
Tabella 4 Descrizione del formato dei messaggi ricevuti
| numero d'ordine | nome | spiegare | codice | Osservazioni |
| 1 | STX0 | Messaggio Start Flag 1 | 55 (h) |
|
| 2 | Cmd_jg | Parola di comando dati | Vedi Tabella 5 |
|
| 3 | Len | Dl | Il numero di tutti i byte tranne il marchio iniziale, la parola di comando e il checksum |
|
| 4 | Dn | parametro | Vedi Tabella 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR Verifica | Tranne il byte valido, tutti gli altri byte sono xed |
|
Controllo principale che riceve lo stato Descrizione:
La tabella 5 descrive la parola dati inviata dal contatore al master
La tabella 5 descrive la parola dati inviata dal contatore al master
| numero d'ordine | CW | Feedback delle funzioni (corrispondente al comando di controllo ricevuto dal dispositivo di misurazione) | byte di dati | Osservazioni | lunghezza complessiva |
| 1 | 0x00 | Stop (Stop Ranging Illumination) | D1 = 00 (H) d0 = xx (H) | XX: 00 STOP0 NORMAL STOP01 ad alta temperatura02 STOP quando è stato scaduto | Sei byte |
| 2 | 0x03 | auto-controllo | D8 ~ d0c5 ~ c0b2 ~ b0 | D8-D7 (tipo int): -5 V Valore di tensione Feedback, Unità 0.01V.D6-D5: Feedback del valore di impostazione del punto cieco, unità 1MD4-D3: Feedback ad alta tensione APD, unità V; D2: tipo char, indicando l'ambiente di controllo principale (ambiente) del valore della corrente di azionamento nell'unità AC1-C0: Controllo della temperatura Feedback della temperatura Unità 0,1 ℃ B2: stato di controllo della temperatura di azionamento (8 bit) Bit0: 0 Controllo della temperatura alla temperatura 1 Non raggiunto il controllo della temperatura 1 è normale 1 Il controllo della temperatura è sovracurrentIt2 maggiore di 5ab1: stato di comunicazione dell'unità (misura lo stato di comunicazione tra la scheda di controllo principale e il modulo di azionamento) 0 è normale e 1 è eargeBit0: Imposta se la corrente è riuscita 1: se la larghezza dell'impulso è impostata correttamente2 Scheda di controllo principale e modulo di controllo della temperatura) 0 è normale e 1 è guastazione 0: se l'avvio del controllo della temperatura è riuscita ettando 1: se l'arresto del controllo della temperatura è riuscita ettacanna 2: se l'impostazione della temperatura è riuscita etta | 22 byte |
| 3 | 0x04 | Impostazione della zona cieca, unità M | D1 D0 | I dati descrivono il valore della distanza più vicino, unità 1 m; avvia in alto e bassa | Six byte (drop power salvals) |
| 4 | 0x06 | Numero cumulativo di query di uscita luminosa | D3 ~ d0 | I dati esprimono il numero di luci, 4 byte, con il byte alto prima | Otto byte |
| 5 | 0x31 | Imposta il codice preciso | D4 d3 ~ d0 | D4: numero di codice preciso, intervallo 1 ~ 8d3 ~ d0 rappresenta il periodo, unità usrange: 45000 ~ 60000 | Nove byte |
| 6 | 0x32 | Imposta codici a intervallo variabile | D1 D0 | D1 Codice intervallo variabile intervallo 1 ~ 16d0 00 è impostato correttamente e 01 è impostato non riuscita | Sei byte |
| 7 | 0x33 | Imposta un codice pseudo-casuale | D1 D0 | D1 Pseudo-Random Codice Numero Range 1 ~ 2d0 00 è impostato correttamente e 01 è impostato non riuscito | Sei byte |
| 8 | 0x41 | Query di ciclo di codice precisa | D4 d3 ~ d0 | D4: numero di codice preciso, intervallo 1 ~ 8d3 ~ d0 rappresenta il periodo, unità usrange: 45000us ~ 60000us | Nove byte |
| 9 | 0x42 | Query del codice a intervallo variabile | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit14 bit15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit 11 and bit 12)D21~D20 (time interval tra bit 10 e bit 11) d19 ~ d18 (intervallo di tempo tra bit9 e bit10) d17 ~ d16 (intervallo di tempo tra bit8 bit9) d15 ~ d14 (intervallo di tempo tra BIT 7 e bit 8) d13 ~ d12 (intervallo di tempo tra bit6 (bit di bit6 (bit di bit6 (bit di bit 6) bit3 bit4) d5 ~ d4 (intervallo di tempo tra bit2 bit3) d3 ~ d2 (intervallo di tempo tra bit1 bit2) d1 ~ d0 (intervallo di tempo tra bit0 bit1) |
|
38 byte |
| 10 | 0x43 | Query in codice pseudo-casuale | D4 d3 ~ d0 | D4: codifica del codice pseudo-random, intervallo 1 ~ 2d3: lunghezza del codice pseudo-casuale, che va da 2 a 16d2 d1: valore iniziale del codice pseudo-random, che viene preso dalla parte inferiore in base alla lunghezza di pseudo-random codifica0: standby, set 0, set 0 | Nove byte |
| 11 | 0x44 | Irradiazione continua Impostazione dell'orario di lavoro | D1 = 00 (H) d0 = YY (H) | Yy tempo di irradiazione continua, unità s, timeout automaticamente | Sei byte |
| 12 | 0x45 | Query di tempo di lavoro dell'esposizione continua | D1 = 00 (H) d0 = YY (H) | Yy tempo di irradiazione continua, unità s, timeout automaticamente | Sei byte |
| 13 | 0x24 | Impostazione dei parametri di irradiazione periodica | D2 D1 D0 | D2: Numero di cicli di lavoro 1: ora di lavoro per ciclo, unità SD0: tempo di riposo per ciclo, in s | Sette byte |
| 14 | 0x25 | Query di parametro di irradiazione periodica | D2 D1 D0 | D2: Numero di cicli di lavoro 1: ora di lavoro per ciclo, unità SD0: tempo di riposo per ciclo, in s | Sette byte |
| 15 | 0xeb | Query numero dell'attrezzatura | D15 ~ d0 | D15 ~ D12: Modello di prodotto D11 D10: prodotto Numberd9 D8: Software versioned7 D6: Regola Q Numberd5 D4: Drive Numberd3 D2: Laser Numberd1 D0: FPGA ID | 20 byte |
| 16 | 0x51 | Modalità di debug | D1 D0 | D1: 01 Enter Debug Modalità, 00 Exit Debug Moded0: Standby | Sei byte |
| 17 | 0x01 | A distanza singola | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (bit7-bit0) byte di bandiera: D9 è la 7a posizione che indica l'onda principale; 1: esiste un'onda principale, 0: nessuna onda principale.d9 è la sesta posizione che indica l'eco; 1: esiste eco, 0: nessun echod9 Il 5 ° bit indica lo stato del laser; 1: Laser normale, 0: Laser guapad9 non è valido (impostato su 0) in 4a posizione; D9 non è valido alla terza posizione (impostata su 0); d9 La seconda posizione indica lo stato APD; 1: normale, 0: Errord9 è la prima posizione che indica se esiste un obiettivo precedente; 1. 1: esiste un bersaglio, 0: non esiste un target (l'obiettivo dopo l'obiettivo principale è il target successivo) D8-D6 Distanza di prima distanza (unità 0,1M) D5-D3 Distanza alla seconda distanza target di target D2-D0 (unità 0,1M) 3. Gli obiettivi provengono da vicino a FARB4 e B3 indicano che i valori ad alta pressione B2 indicano il valore della corrente di azionamento B0 indica la temperatura del laser | 19 byte |
| 18 | 0x02 | A distanza continua | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) byte bandiera: D9 è 7a posizione che indica l'onda principale; 1: esiste un'onda principale, 0: nessuna onda principale.d9 è la sesta posizione che indica l'eco; 1: esiste eco, 0: nessun echod9 Il 5 ° bit indica lo stato del laser; 1: Laser normale, 0: Laser guastad9 non è valido alla quarta posizione (impostata su 0); D9 non è valido alla terza posizione (impostata su 0); d9 La seconda posizione indica lo stato APD; 1: normale, 0: Errord9 è la prima posizione per indicare se esiste un obiettivo precedente; 1: esiste un bersaglio, 0: non esiste un bersaglio (l'obiettivo prima dell'obiettivo principale è l'obiettivo precedente e il bersaglio nell'area cieca). D9 Il 0 ° bit indica se esiste un obiettivo successivo; 1: esiste un bersaglio, 0: non esiste un bersaglio (il bersaglio dopo l'obiettivo principale è un target successivo) D8-D6 Distanza di prima distanza (unità 0,1M) D5-D3 Distanza alla seconda target (unità: 0,1M) D2-D0 Terza distanza target (unità 0,1M) 3. Gli obiettivi provengono da vicino a FARB4 e B3 indicano che il valore APD ad alta pressione B2 indica che il valore della corrente di azionamento B0 rappresenta la temperatura del laser | 19 byte |
| 19 | 0x30 | splendente | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) byte di bandiera: D9 è il 7 ° bit per indicare l'onda principale; 1: esiste un'onda principale, 0: nessuna onda principale.d9 è la sesta posizione che indica l'eco; 1: esiste eco, 0: nessun echod9 Il 5 ° bit indica lo stato del laser; 1: Laser normale, 0: Laser guastad9 non è valido nella posizione 4 (impostata su 0) D9 non è valido alla terza posizione (impostata su 0); d9 La seconda posizione indica lo stato APD; 1: normale, 0: Errord9 è la prima posizione per indicare se esiste un obiettivo precedente; 1. 1: esiste un bersaglio, 0: non esiste un bersaglio (l'obiettivo dopo il target principale è il target successivo) D8-D6 Distanza di prima distanza (unità 0,1M) D5-D3 Distanza alla seconda target (0,1M) D2-D0 Terza distanza target (unità 0,1M) 3. Gli obiettivi provengono da vicino a FARB4 e B3 indicano che il valore APD ad alta pressione B2 indica che il valore della corrente di azionamento B0 rappresenta la temperatura del laser | 19 byte |
| 20 | 0xec | Un errore di istruzione | D1 = 00 d0 = 00 | Il comando di feedback della fotocamera non è corretto | Sei byte |
| 21 | 0xee | Errori di efficacia | D1 = 00 d0 = 00 | Il feedback della fotocamera non è corretto | Sei byte |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Nota: ① byte/bit dati non definiti, predefinito è 0; | |||||
Tag caldi: 45mj Laser Target Designator (Ltd) WiHT LRF, produttori, fornitori, fabbrica, Cina, Made in Cina, personalizzato, di alta qualità
Categoria correlata
Modulo telemetro laser 905nm
Modulo telemetro laser 1535nm
Modulo telemetro laser 1570nm
1,54UM LASER RANGE FINDER MODULO
1064nm designatori target laser
Modulo di stestem anti drone
Modulo Lidar a distanza
Invia richiesta
Non esitate a dare la vostra richiesta nel modulo sottostante. Ti risponderemo entro 24 ore.




 Wiht LRF")