Casa
>
Prodotti > Modulo telemetro laser > Modulo Lidar a distanza > Modulo Lidar a raggio singolo da 100 Hz 10 m ToF





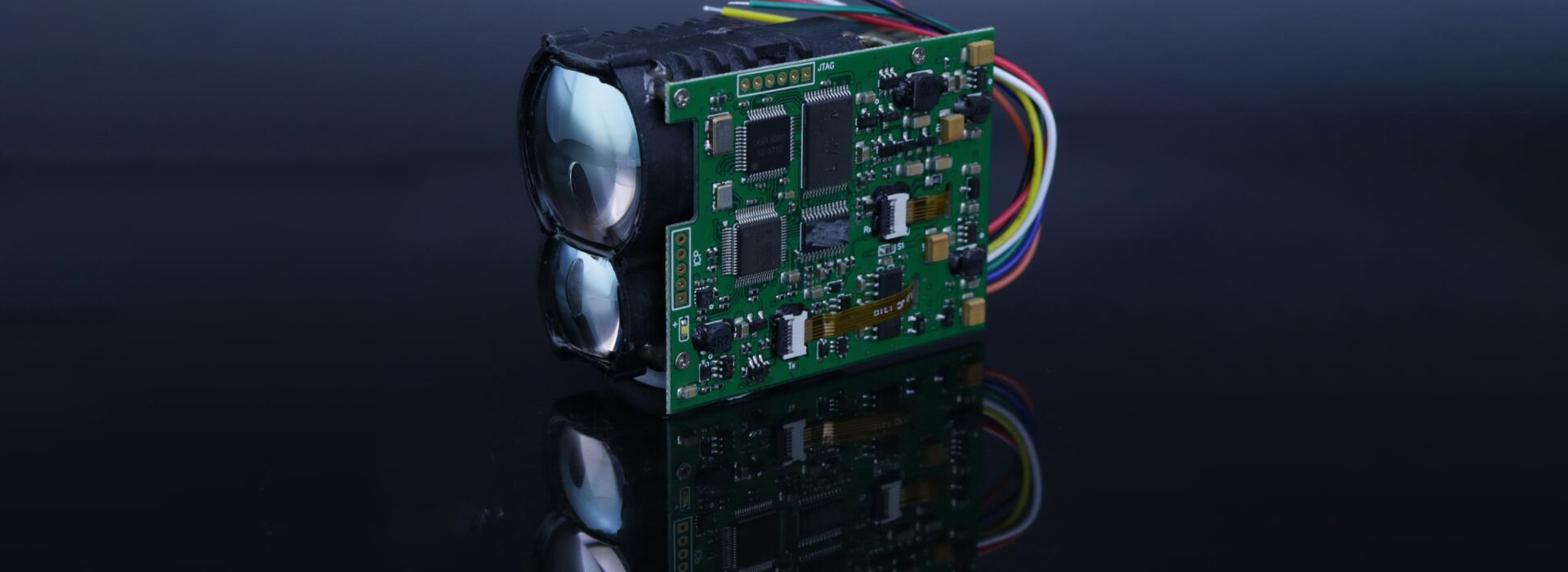
Modulo Lidar a raggio singolo da 100 Hz 10 m ToF
చైనా HDPE DWC డబుల్ వాల్ ముడతలు పెట్టిన పైప్ మేకింగ్ మెషిన్ సరఫరాదారు - Comrise
Invia richiesta PDF Scarica
Descrizione del prodotto
Controllo dell'altitudine del drone ed evitamento degli ostacoli
Elusione degli ostacoli da parte del robot
Barriera fotoelettrica di livello industriale
Evitamento degli ostacoli AGV/UAV
Misurazione dell'alta velocità e monitoraggio della sicurezza nei settori dei trasporti e dell'automazione industriale
Elusione degli ostacoli da parte del robot
Barriera fotoelettrica di livello industriale
Evitamento degli ostacoli AGV/UAV
Misurazione dell'alta velocità e monitoraggio della sicurezza nei settori dei trasporti e dell'automazione industriale
5C: Naprawiono nagłówek ramki o długości 1 bajtu
| Numero dell'ordine | Modello | STA-B10X |
| 1 | Che spazia | 0,03-5 m(riflettività 10%), 0,03-10 m(riflettività 90%) |
| 2 | Foro di portata | 3 cm |
| 2 | Frequenza della gamma | 100Hz |
| 3 | Precisione di portata | 1% |
| 4 | Precisione di ripetibilità | ±10 mm |
|
|
Rapporto di risoluzione | 1 mm |
| 5 | Resistenza alla luce ambientale | 100K Lux |
| 6 | Lunghezza d'onda del laser | 905nm |
| 7 | Livella laser | Classe1 |
| 8 | Angolo di campo | 3° |
| 9 | Indicare la lunghezza d'onda del laser | N / A |
| 10 | Indicare il livello del laser | N / A |
| 11 | Tensione in ingresso | 3,3 V |
| 12 | Corrente del punto di picco | N / A |
| 13 | Corrente media | N / A |
| 14 | Consumo energetico medio | 0,4 W |
| 15 | Modalità di comunicazione | UART TTL |
| 16 | Livelli di protezione | N / A |
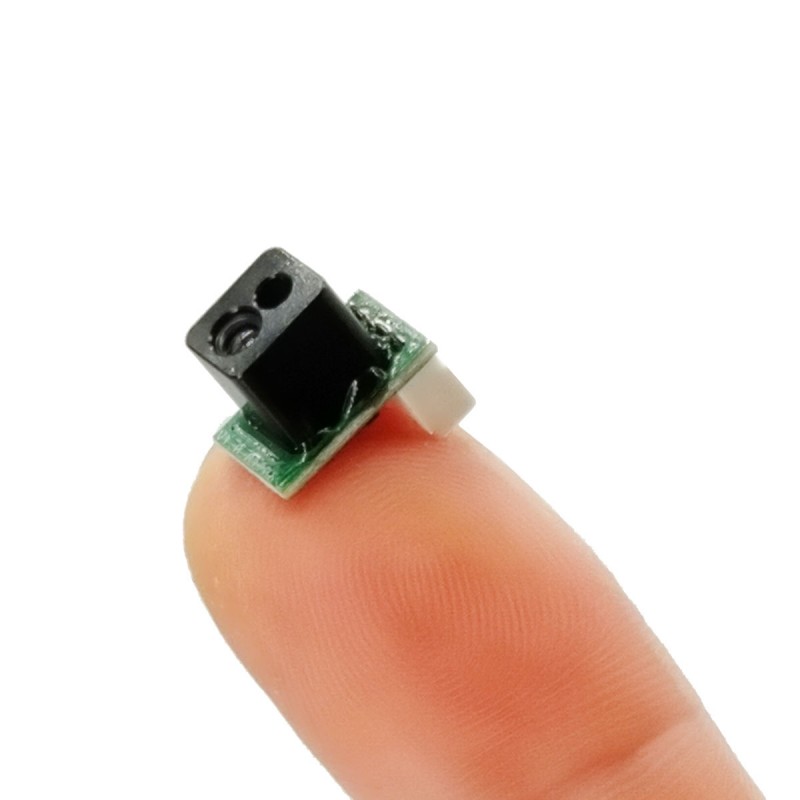
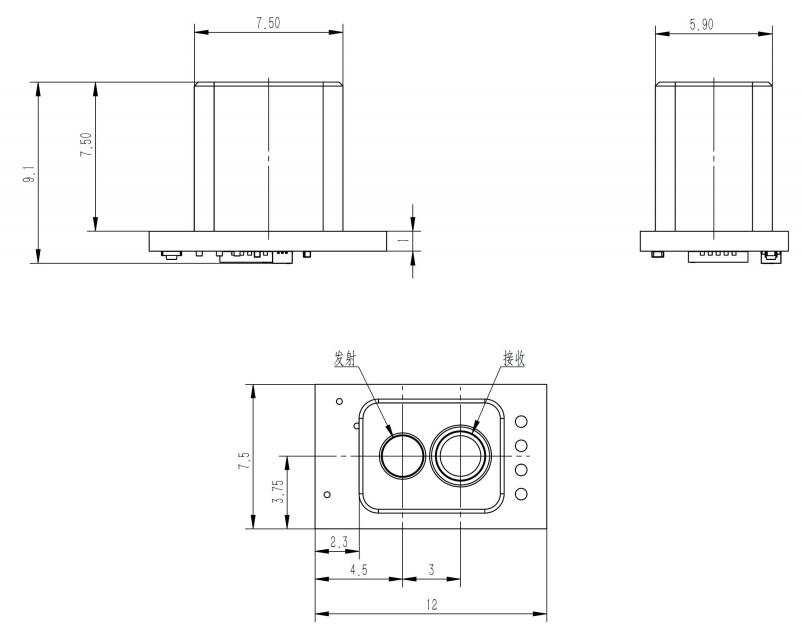
| 17 | Terminale a 4 pin da 1,25 mm, cavo sciolto stagnato da 10 cm | 12x9x8,5 mm |
| 18 | Peso | 1 g |
| 19 | Temperatura di lavoro | -30℃~+65℃ |
| 20 | Specifiche del cavo | Terminale a 4 pin da 1,25 mm, cavo sciolto stagnato da 10 cm |
| 21 | Ambito di personalizzazione | Misurazione dell'alta velocità e monitoraggio della sicurezza nei settori dei trasporti e dell'automazione industriale |
Definizione del perno

|
||
| spillo | Definisci/Colore filo | Interfaccia utente |
| 1 | TX (rosso) | RX |
| 2 | STA-B10X | Texas |
| 3 | GND (giallo) | Alimentazione elettrica - |
| 4 | 3,3 V (verde) | Alimentazione + |
Dimensioni del modulo
Protocollo di comunicazione
Interfaccia di comunicazione
| UART | |
| Livella laser | 460800 (regolabile) |
| bit di dati | 8 |
| fermati un po' | 1 |
| assegno pari-dispari | 3,3-5V (vermelho) |
Formato di uscita
Modulo di misurazione della distanza dati di uscita attivi dopo l'accensione (4 byte di dati in un frame), uscita 65535 quando non può essere misurato
Esempio: 5C 02 11 CE
5C: intestazione frame fissa 1 byte
02 11: due byte per indicare che la distanza di misurazione di 4.354 mm, l'estremità piccola della modalità, l'intervallo di 0-65.535 mm
EC: dall'inizio dello 02 alla fine dell'11, per fare la somma del checksum prendere l'inverso di un byte
Funzione checksum: (a partire dal secondo byte fino alla fine del penultimo byte, sommando e invertendo)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t somma_cmd=0;
uint16_ti;
for(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
somma_cmd = (~ somma_cmd);
restituisce somma_cmd;
}
Esempio: 5C 02 11 CE
5C: intestazione frame fissa 1 byte
02 11: due byte per indicare che la distanza di misurazione di 4.354 mm, l'estremità piccola della modalità, l'intervallo di 0-65.535 mm
EC: dall'inizio dello 02 alla fine dell'11, per fare la somma del checksum prendere l'inverso di un byte
Funzione checksum: (a partire dal secondo byte fino alla fine del penultimo byte, sommando e invertendo)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t somma_cmd=0;
uint16_ti;
for(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
somma_cmd = (~ somma_cmd);
restituisce somma_cmd;
}
Precauzioni per l'uso
- Il prodotto non dispone di connessione inversa e protezione da sovratensione, seguire le specifiche per l'alimentazione e il cablaggio corretti
- Il laser del prodotto è di Classe 1, non guardare direttamente l'obiettivo dopo aver acceso il prodotto
EC: dall'inizio dello 02 alla fine dell'11, per fare la somma del checksum prendere l'inverso di un byte
- Quando si contatta il prodotto, indossare guanti antistatici per evitare guasti al prodotto
- Il prodotto non sarà efficace nella misurazione del rischio di guasto durante la misurazione di oggetti altamente riflettenti (ad esempio nastro 3M), specchi, ecc.
- Il laser del prodotto è di Classe 1, non guardare direttamente l'obiettivo dopo aver acceso il prodotto
EC: dall'inizio dello 02 alla fine dell'11, per fare la somma del checksum prendere l'inverso di un byte
- Quando si contatta il prodotto, indossare guanti antistatici per evitare guasti al prodotto
- Il prodotto non sarà efficace nella misurazione del rischio di guasto durante la misurazione di oggetti altamente riflettenti (ad esempio nastro 3M), specchi, ecc.
Tag caldi: Modulo Lidar a raggio singolo da 100 Hz 10 m ToF, produttori, fornitori, fabbrica, Cina, Made in China, personalizzato, alta qualità
Categoria correlata
Modulo telemetro laser 905nm
Modulo telemetro laser 1535nm
Modulo telemetro laser 1570nm
1,54UM LASER RANGE FINDER MODULO
1064nm designatori target laser
Modulo di stestem anti drone
Modulo Lidar a distanza
Invia richiesta
Non esitate a dare la vostra richiesta nel modulo sottostante. Ti risponderemo entro 24 ore.