Casa
>
Prodotti > Modulo telemetro laser > Modulo telemetro laser 1535nm > Modulo Finder per range laser da 4 km (LRF)




")




Modulo Finder per range laser da 4 km (LRF)
STA-B40X è un modulo di misurazione della distanza laser per occhio umano, che può rilevare la distanza target e trasmettere la distanza misurata al computer superiore attraverso la comunicazione seriale. Visibilità ≥ 12 km, riflettività target ≥ 0,3, umidità ≤ 80%, il veicolo (2,3 m × 2,3 m target) distanza di variazione ≥ 4 km.
Invia richiesta
Descrizione del prodotto
Funzioni principali
(1) a distanza singola e a distanza continua;
(2) rispondere ai comandi che vanno al laser e può smettere di vagare in qualsiasi momento secondo il comando di arresto;
(3) dati sulla distanza di uscita e informazioni sullo stato una volta per impulso durante la misurazione della distanza;
(4) può segnalare il numero cumulativo di impulsi laser trasmessi (nessuna perdita di potenza);
(5) Selezione della distanza, indicazione target anteriore e posteriore;
(6) Funzione di autotest.
(2) rispondere ai comandi che vanno al laser e può smettere di vagare in qualsiasi momento secondo il comando di arresto;
(3) dati sulla distanza di uscita e informazioni sullo stato una volta per impulso durante la misurazione della distanza;
(4) può segnalare il numero cumulativo di impulsi laser trasmessi (nessuna perdita di potenza);
(5) Selezione della distanza, indicazione target anteriore e posteriore;
(6) Funzione di autotest.
Indice di performance del prodotto
| Articolo | Parametro tecnico | Istruzione |
| Modello | STA-B40X | |
| Lunghezza d'onda di lavoro | 1535 ± 5 nm | |
| Sicurezza degli occhi | Classe 1 (IEC 60825-1) | |
| Ricevere apertura | Φ16mm | |
| Apertura di emissione | Φ13mm | |
| Capacità di distanza | 30-8000 m | |
| Range Range | ≥8000 m | Max, riflettività: 0,9, visibilità dell'osservatore 25 km |
| ≥6000 m | Obiettivi di grande edificio, riflettività: 0,6, visibilità dell'osservatore 20 km | |
| ≥4000 m | Target NATO | |
| ≥2000 m | Bersaglio umano | |
| ≥1200m | Target UAV | |
| Mini gamma | 30m |
|
| Rilevamento multi-target | Fino a 3 bersaglio |
|
| Risoluzione della gamma | 20m |
|
| Precisione a distanza | ± 1 m | 3d |
| Frequenza a distanza | 1 ~ 10Hz regolabile |
|
| Tasso di precisione | ≥98% |
|
| Tasso di falso allarme | 1% |
|
| Angolo di divergenza | ≤0.6Mrad |
|
| Interfaccia di comunicazione | Ttl | L'interfaccia RS422/RS232 può essere personalizzata |
| Voltaggio | DC4.5 ~ 16V |
|
| Consumo energetico | ≤1.2w (@1Hz) | Potere di lavoro |
| ≤5w@12V | Potenza di punta | |
| Stabilità dell'asse ottico laser | ≤0,05Mrad |
|
| Errore parallelo | ≤0.3Mrad | Errore di parallelismo dell'asse ottico al riferimento |
| Shock meccanico | 75g, 1ms |
|
| Temperatura di lavoro | -40 ℃~+70 ℃ |
|
| Temperatura di conservazione | -55 ℃~+75 ℃ |
|
| Affidabilità | MTBF ≥ 1500h |
|
| Misurare | ≤19x24x37mm |
|
| Peso | ≤50g |
|
| Funzione principale | Primo e ultimo target che varia, a distanza multi-target, selettività della distanza | |
Note:
1) dimensione target NATO 2,3 m × 2,3 m; Dimensione del bersaglio umano 0,5 m × 1,7 m; Target Dimensione del target UAV 0,2 m × 0,3 m; Riflettività 30%, umidità≤80%, visibilità dell'osservatore. 12 km
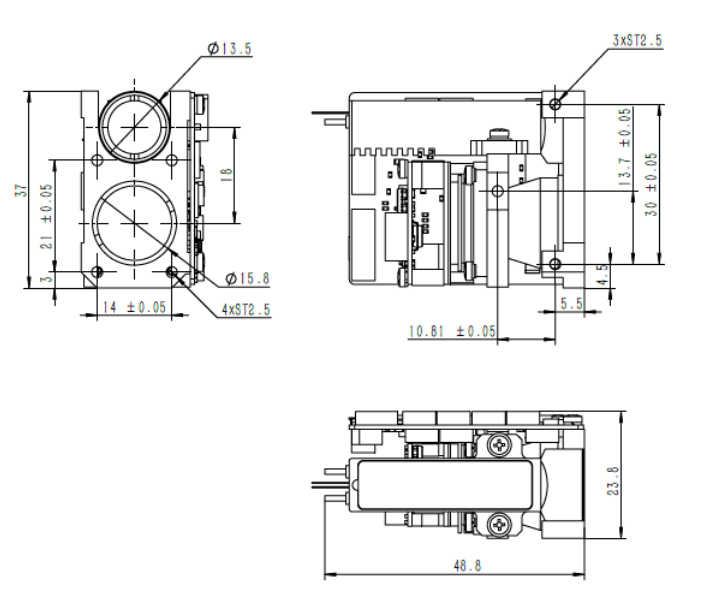
Interfaccia di installazione della struttura
Requisiti di interfaccia elettrica
Interfaccia di comunicazione: UART (TTL_3.3 V), 115200 bps, 1 bit di avvio, 8 bit di dati, 1 stop no, nessuna bit di parità;
Tabella 1 Definizione principale
Tabella 1 Definizione principale
| Spillo | Definizione | Colore della linea | Note |
| 1 | Alimentazione + | Rosso | 4.5-16v |
| 2 | Alimentazione elettrica - | Nero | GND |
| 3 | Power_on | Bianco | Potenza sul controllo TTL_3.3V Livello, Modulo ON (> 2,7V), Modulo Off (<0,3 V) |
| 4 | Uart_tx | Giallo | Mittente porta seriale |
| 5 | Uart_rx | Verde | Ricevitore della porta seriale |
| 6 | GND | Nero | Terra porta seriale |
Moduli che portano OEM/ODM e soluzioni personalizzate
La B40X è progettata per gli integratori di sistema che cercano una soluzione comoda, potente e compatta a distanza di laser. Fornisce prestazioni affidabili in una vasta gamma di applicazioni.
È molto piccolo, ultra-luce, ha un basso consumo energetico e può essere misurato a lunga distanza. È adatto per dispositivi portatili (imaging termico), applicazioni di montaggio delle armi, sistemi portatili e suite di sensori leggeri e veicoli aerei senza pilota o UGV.
È molto piccolo, ultra-luce, ha un basso consumo energetico e può essere misurato a lunga distanza. È adatto per dispositivi portatili (imaging termico), applicazioni di montaggio delle armi, sistemi portatili e suite di sensori leggeri e veicoli aerei senza pilota o UGV.
Protocollo comunicante
1. Protocollo di trasmissione: comunicazione seriale asincrona;
2. Porta di porta: 115200;
3. BIT di dati: 10Bit: un bit di avvio, 8 bit di dati, un bit di arresto, verifica non valida;
4. Struttura dei dati: i dati sono costituiti dal byte di intestazione, parte del comando, lunghezza dei dati, parte dei parametri e byte di controllo;
5. Modalità di comunicazione: il controllo principale invia comandi di controllo alla macchina a distanza e la macchina a distanza riceve ed esegue le istruzioni. Nello stato a distanza, la macchina a distanza invia dati e stato della macchina a distanza al computer superiore in base al ciclo a distanza. Il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
A) Invia il controllo principale
Il formato del messaggio da inviare è il seguente:
2. Porta di porta: 115200;
3. BIT di dati: 10Bit: un bit di avvio, 8 bit di dati, un bit di arresto, verifica non valida;
4. Struttura dei dati: i dati sono costituiti dal byte di intestazione, parte del comando, lunghezza dei dati, parte dei parametri e byte di controllo;
5. Modalità di comunicazione: il controllo principale invia comandi di controllo alla macchina a distanza e la macchina a distanza riceve ed esegue le istruzioni. Nello stato a distanza, la macchina a distanza invia dati e stato della macchina a distanza al computer superiore in base al ciclo a distanza. Il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
A) Invia il controllo principale
Il formato del messaggio da inviare è il seguente:
| STX0 | Cmd | Len | Data1h | Data1l | Chk |
| numero d'ordine | nome | spiegare | codice | Osservazioni |
| 1 | STX0 | Flag di avvio del messaggio | A5 (H) |
|
| 2 | Cmd | CW | Vedi Tabella 3 |
|
| 3 | Len | Dl | Il numero di tutti i byte tranne il marchio iniziale, la parola di comando e il checksum |
|
| 4 | Datah | parametro | Vedi Tabella 3 |
|
| 5 | arrivo |
|
||
| 6 | Chk | XOR Verifica | Tranne il byte valido, tutti gli altri byte sono xed |
|
Il comando è descritto come segue:
Tabella 3 Descrizione dei comandi e delle parole di dati inviate dal master alla macchina a distanza
Tabella 3 Descrizione dei comandi e delle parole di dati inviate dal master alla macchina a distanza
| numero d'ordine | CW | funzione | byte di dati | Osservazioni | lunghezza | Codice di esempio |
| 1 | 0x00 | cessare | Datah = 00 (H) Datal = 00 (H) | Il telemetro smette di misurare | Sei byte | A5 00 02 00 A7 |
| 2 | 0x01 | A distanza singola | Datah = 00 (H) Datal = 00 (H) |
|
Sei byte | A5 01 02 00 00 A6 |
| 3 | 0x02 | A distanza continua | Datah = xx (H) Datal = YY (H) | I dati descrivono il periodo di distanza, in MS | Sei byte | A5 02 02 03 E8 4E (1Hz Ranging) |
| 4 | 0x03 | auto-controllo | Datah = 00 (H) Datal = 00 (H) |
|
Sei byte | A5 02 02 00 A4 |
| 5 | 0x04 | Imposta la distanza più vicina alla selezione | Datah = xx (H) Datal = YY (H) | I dati descrivono il valore della zona cieca, unità 1m | Sei byte | A5 04 02 00 64 C7 (100 m è la distanza più vicina) |
| 6 | 0x06 | Numero cumulativo di query di uscita luminosa | Datah = 00 (H) Datal = 00 (H) | Numero cumulativo di query di uscita luminosa | Sei byte | A5 06 02 00 A1 |
| 7 | 0x11 | Il potere APD è acceso | Datah = 00 (H) Datal = 00 (H) |
|
Sei byte | A5 11 02 00 B6 |
| 8 | 0x12 | APD Power è spento | Datah = 00 (H) Datal = 00 (H) |
|
Sei byte | A5 12 02 00 B5 |
| 9 | 0xeb | Query numerica | Datah = 00 (H) Datal = 00 (H) | Query numerica | Sei byte | A5 EB 02 00 00 4C |
a) Il controllo principale riceve il formato
Il formato del messaggio ricevuto è il seguente:
Il formato del messaggio ricevuto è il seguente:
| STX0 | Cmd | Len | Dati | Data0 | Chk |
Tabella 4 Descrizione del formato dei messaggi ricevuti
| numero d'ordine | nome | spiegare | codice | Osservazioni |
| 1 | STX0 | Messaggio Start Flag 1 | A5 (H) |
|
| 2 | Cmd_jg | Parola di comando dati | Vedi Tabella 5 |
|
| 3 | Len | Dl | Il numero di tutti i byte tranne il marchio iniziale, la parola di comando e il checksum |
|
| 4 | Dn | parametro | Vedi Tabella 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR Verifica | Tranne il byte valido, tutti gli altri byte sono xed |
|
Controllo principale che riceve lo stato Descrizione:
La tabella 5 descrive la parola dati inviata dal rangefinder al controller principale
La tabella 5 descrive la parola dati inviata dal rangefinder al controller principale
| numero d'ordine | CW | funzione | byte di dati | Osservazioni | lunghezza complessiva |
| 1 | 0x00 | cessare | D1 = 00 (H) d0 = 00 (H) |
|
Sei byte |
| 2 | 0x03 | auto-controllo | D8 ~ d1 | D8-D7: tensione -5 V, unità 0,01V.D6-D5: valore spot cieco, unità 1md4: valore ad alta tensione APD, unità V; D3: tipo char, che indica la temperatura APD, unità: gradi Celsius; D2-D1: +5V tensione, unità 0.01V | 12 byte |
| 3 | 0x04 | Distanza dall'impostazione di accesso più vicina, unità M | D1 D0 | I dati descrivono il valore della distanza più vicino, unità 1 m; avvia in alto e bassa | Sei byte |
| 4 | 0x06 | Numero cumulativo di query di uscita luminosa | D3 ~ d0 | I dati esprimono il numero di luci, 4 byte, con il byte alto prima | Sette byte |
| 5 | 0x11 | Il potere APD è acceso | D1 = 00 (H) d0 = 00 (H) | Il potere APD è acceso | Sei byte |
| 6 | 0x12 | APD Off | D1 = 00 (H) d0 = 00 (H) | APD Power è spento | Sei byte |
| 7 | 0xed | Lavorare gli straordinari | 0x00 0x00 | Il laser è sotto protezione da lavoro laser e non può essere misurato. | Sei byte |
| 8 | 0xee | Errori di efficacia | 0x00 0x00 |
|
Sei byte |
| 9 | 0xef | Timeout di comunicazione della porta seriale | 0x00 0x00 |
|
Sei byte |
| 10 | 0x01 | Misurazione a intervallo singolo (target singolo, zero per il secondo e terzo obiettivo, zero per il terzo bersaglio all'inizio e alla fine del bersaglio) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 DASCETTA DUE TARGET DANNE (unità 0,1M) Distanza D5-D3 alla seconda target (unità: 0,1M) D2-D0 Terza distanza target (unità 0,1M) 3. Gli obiettivi provengono da vicino al byte FLAG FARD9 (BIT7-BIT0): D9 è la settima posizione che indica l'onda principale; 1: esiste un'onda principale, 0: nessuna onda principale.d9 è la sesta posizione che indica l'eco; 1: c'è eco, 0: no echod9 La quinta posizione indica lo stato del laser; 1: Laser normale, 0: Laser guastad9 è il quarto bit della flag timeout, 1: normale, 0: timeoutd9 non è valido in 3a posizione (impostata su 1); d9 La seconda posizione indica lo stato APD; 1: normale, 0: Errord9 è la prima posizione per indicare se esiste un obiettivo precedente; 1: esiste un obiettivo precedente, 0: nessun obiettivo precedente (target nell'area cieca) .d9 Il 0 ° bit indica se esiste un obiettivo successivo; 1: esiste un target successivo, 0: nessun obiettivo successivo (l'obiettivo dopo l'obiettivo principale è l'obiettivo successivo) | 14 byte |
| 11 | 0x02 | Ranging continuo (bersaglio singolo, zero per il secondo e terzo obiettivo, zero per il terzo bersaglio all'inizio e alla fine del bersaglio) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 DASCETTA DUE TARGET DANNE (unità 0,1M) Distanza D5-D3 alla seconda target (unità: 0,1M) D2-D0 Terza distanza target (unità 0,1M) 3. Gli obiettivi provengono da Byte FLAG FARD9 (BIT7-BIT0): D9 è il 7 ° bit per indicare l'onda principale; 1: esiste un'onda principale, 0: nessuna onda principale.d9 è la sesta posizione che indica l'eco; 1: c'è eco, 0: no echod9 La quinta posizione indica lo stato del laser; 1: Laser normale, 0: Laser guastad9 è il quarto bit della flag timeout, 1: normale, 0: timeoutd9 non è valido in 3a posizione (impostata su 1); d9 La seconda posizione indica lo stato APD; 1: normale, 0: Errord9 è la prima posizione per indicare se esiste un obiettivo precedente; 1: esiste un obiettivo precedente, 0: nessun obiettivo precedente (target nell'area cieca) .d9 Il 0 ° bit indica se esiste un obiettivo successivo; 1: esiste un target successivo, 0: nessun obiettivo successivo (l'obiettivo dopo l'obiettivo principale è l'obiettivo successivo) | 14 byte |
| 12 | 0xeb | Query numerica | D17 …… D0 | D17 D16 D15 D14 D13 D12 MODELLO MACCHINA INTERO CODED11D10 Numberd9 D6 Software versioned5 D4 APD Numberd3 D2 Numberversion laser D1 di FPGA | 22 byte |
| Nota: ① byte/bit dati non definiti, predefinito è 0; | |||||
Tag caldi: Modulo Finder Laser Range (LRF) di 4 km (LRF), produttori, fornitori, fabbrica, Cina, realizzato in Cina, personalizzato, di alta qualità
Categoria correlata
Modulo telemetro laser 905nm
Modulo telemetro laser 1535nm
Modulo telemetro laser 1570nm
1,54UM LASER RANGE FINDER MODULO
1064nm designatori target laser
Modulo di stestem anti drone
Modulo Lidar a distanza
Invia richiesta
Non esitate a dare la vostra richiesta nel modulo sottostante. Ti risponderemo entro 24 ore.