Casa
>
Prodotti > Giroscopio in fibra ottica > Giroscopio a fibre ottiche > Giroscopio in fibra ottica-mems di misurazione inerziale





Giroscopio in fibra ottica-mems di misurazione inerziale
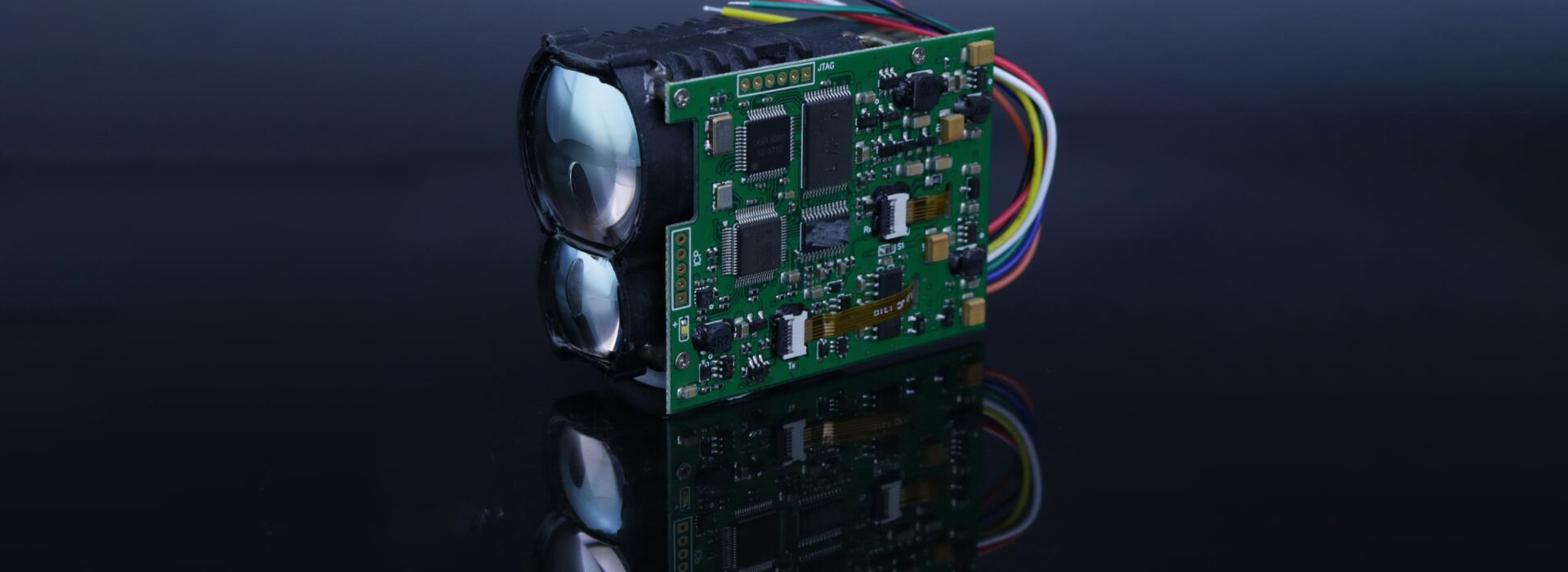
L'unità di misurazione inerziale di Jio-MC200-IMU in fibra ottica-MEMS è un'unità di misurazione inerziale basata sulla tecnologia micro-meccanica (MEMS) con un accelerometro MEMS e MEMS incorporato che educe la velocità angolare a 3 assi e l'accelerazione a 3 assi.
Modello:JIO-MC200-IMU
Invia richiesta
Descrizione del prodotto
Jio-MC200-IMU in fibra ottica giroscopio-mems L'unità di misurazione inerziale ha un'eccellente adattabilità sessuale e ambientale. Attraverso la corrispondenza di diversi software, i prodotti possono essere ampiamente utilizzati in munizioni guidate, UAV tattici e industriali, veicoli aerei senza pilota, cercatore, guida autonoma.
L'installazione di jioptics del giroscopio in fibra ottica per fornire facilità di flessibilità di integrazione e i nostri sviluppatori toolkit alla prototipazione rapida, non solo soddisfano i requisiti di specifica, ma forniscono anche prestazioni di alta qualità soddisfano la domanda degli utenti finali.
L'installazione di jioptics del giroscopio in fibra ottica per fornire facilità di flessibilità di integrazione e i nostri sviluppatori toolkit alla prototipazione rapida, non solo soddisfano i requisiti di specifica, ma forniscono anche prestazioni di alta qualità soddisfano la domanda degli utenti finali.
I nostri servizi
Jioptics è una squadra professionale ed efficiente. Fornisci i servizi OEM/ODM per te, contattaci per personalizzare il tuo giroscopio in fibra ottica esclusiva
Caratteristiche del prodotto
1) Giroscopio digitale a tre assi:
a) intervallo di misurazione dinamica ± 450º/s;
b) stabilità di bias zero: 20 °/h (GJB, 10S);
2) Accelerometro digitale a tre assi:
a) ± 16G intervallo di misurazione dinamica;
b) stabilità di bias zero: 0,5 mg (GJB, 10S);
3) alta affidabilità: MTBF> 20000h;
4) intervallo di temperatura completa (-40 ℃ ~ 70 ℃) per garantire l'accuratezza: algoritmo di calibrazione e compensazione incorporata per prestazioni ad alte prestazioni;
5) adatto per il lavoro in condizioni di vibrazione forti;
Interfaccia 1 via Uart
a) intervallo di misurazione dinamica ± 450º/s;
b) stabilità di bias zero: 20 °/h (GJB, 10S);
2) Accelerometro digitale a tre assi:
a) ± 16G intervallo di misurazione dinamica;
b) stabilità di bias zero: 0,5 mg (GJB, 10S);
3) alta affidabilità: MTBF> 20000h;
4) intervallo di temperatura completa (-40 ℃ ~ 70 ℃) per garantire l'accuratezza: algoritmo di calibrazione e compensazione incorporata per prestazioni ad alte prestazioni;
5) adatto per il lavoro in condizioni di vibrazione forti;
Interfaccia 1 via Uart
Campo dell'applicazione
1) Munizioni guidate
2) Seeker
3) droni tattici e industriali
4) Autopilota
2) Seeker
3) droni tattici e industriali
4) Autopilota
Metriche del prodotto
| Parametri | Condizioni di prova | Minimo | Valore tipico | Valore massimo | Unità | |
| Giroscopio | Intervallo di misurazione dinamica |
|
|
450 |
|
°/s |
| Stabilità a pregiudizio zero | 10s media (-40 ℃ ~+70 ℃, temperatura costante) |
|
20 |
|
°/h. | |
| Zero pregiudizi | Gamma di distorsioni zero |
|
+ / - 0,2 |
|
°/s | |
| Zero deviazione ① sull'intero intervallo di temperatura |
|
+ / - 0.1 |
|
°/s | ||
| Ripetibilità per inizi successivi, Asse Z |
|
30 |
|
°/h. | ||
| Effetto dell'accelerazione lineare sul pregiudizio zero |
|
10 |
|
°/h/g | ||
| Vibrazione ② sull'effetto di polarizzazione zero, prima e dopo la vibrazione cambio2 |
|
10 |
|
°/h/g | ||
| Vibrazione ② a zero effetto di polarizzazione, vibrazione dopo cambiamenti di vibrazione2 |
|
10 |
|
°/h/g | ||
| Fattore di scala | Il fattore di scala non è lineare |
|
500 |
|
ppm | |
| Precisione del fattore di scala |
|
2000 |
|
ppm | ||
| Densità del rumore |
|
|
0.003 |
|
° / hz / s) | |
| Risoluzione |
|
|
3.052 x 10−7 |
|
°/s/lsb | |
| Accelerometro | Intervallo di misurazione dinamica |
|
|
16 |
|
g |
| Stabilità a pregiudizio zero | 10s media (-40 ℃ ~+70 ℃, temperatura costante) |
|
0.5 |
|
mg | |
| Zero pregiudizi | Gamma di distorsioni zero |
|
5 |
|
mg | |
| Deviazione zero in gamma di temperature complete |
|
5 |
|
mg | ||
| Successivamente inizia la ripetibilità |
|
0.5 |
|
mg | ||
| Fattore di scala | Il fattore di scala non è lineare |
|
500 |
|
ppm | |
| Precisione del fattore di scala |
|
2000 |
|
ppm | ||
| Densità del rumore |
|
|
0.05 |
|
HZ/mg) | |
| Risoluzione |
|
|
1.221 x 10−8 |
|
G/LSB | |
| Altre proprietà | Tempo di avvio |
|
|
2 |
|
s |
| Larghezza di banda |
|
|
200 |
|
Hz | |
| Ritardo |
|
|
10 |
|
SM | |
| Interfaccia di comunicazione | 1 modo uart | Tasso di baud |
|
460.8 |
|
Kbps |
| Frequenza di campionamento | Uart |
|
500 |
|
Hz | |
| Caratteristiche elettriche | Voltaggio |
|
4.8 | 5 | 5.2 | V |
| Consumo energetico |
|
|
1.5 |
|
W | |
| Ondulazione | P-P |
|
100 |
|
MV | |
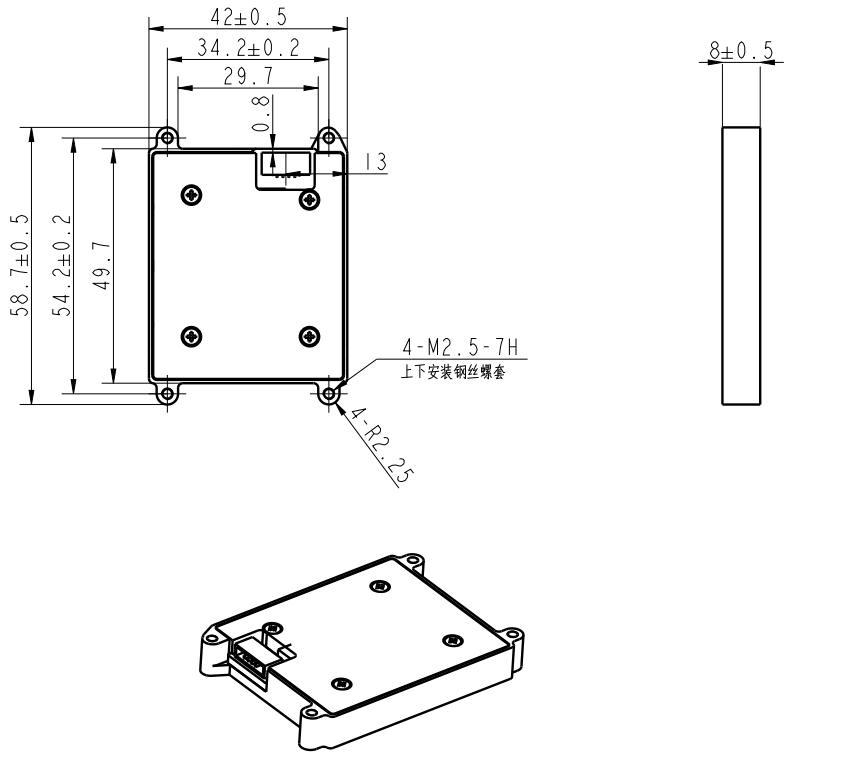
| Caratteristiche strutturali | Misurare |
|
|
58,7 x 42 x 8 |
|
mm |
| Peso |
|
|
35 |
|
g | |
| Ambiente d'uso | Temperatura operativa |
|
- 40 |
|
70 | ℃ |
| Temperatura di conservazione |
|
- 45 |
|
75 | ℃ | |
| Vibrazione |
|
|
20 a 2000Hz, 6,06g |
|
|
|
| Impatto |
|
|
500 g |
|
|
|
| Affidabilità | Mtbf |
|
|
20000 |
|
h |
| Orario di lavoro continuo |
|
|
120 |
|
h | |
| 1①: calcolare la deviazione zero dell'intero processo di variazione della temperatura, velocità di variazione della temperatura ≤1 ℃/min, intervallo di temperatura -40 ℃ ~+70 ℃; 2②: la condizione di vibrazione è 6,06g, 20Hz ~ 2000Hz |
||||||
Interfaccia elettrica
Tipo di connettore: A1251WR-S-4P;
I punti del connettore sono definiti nella tabella seguente:
I punti del connettore sono definiti nella tabella seguente:
| Pin | Definizione | Funzioni | Osservazioni |
| 1 | 5v | Input di potenza DC |
|
| 2 | GND | A |
|
| 3 | TX LV-TTL | Serial port sending | 3.3 v |
| 4 | Rx Lv-TTL | Ricezione della porta seriale | 3.3 v |
Interfaccia software
TAUD TAUD: 460800bps;
Invia frequenza: 500Hz;
Formato dati: bit di dati 8, bit di arresto 1, nessuno bit di parità;
Quando i dati vengono trasmessi, sono bassi e quindi alti.
I protocolli di comunicazione sono mostrati nella tabella seguente:
Invia frequenza: 500Hz;
Formato dati: bit di dati 8, bit di arresto 1, nessuno bit di parità;
Quando i dati vengono trasmessi, sono bassi e quindi alti.
I protocolli di comunicazione sono mostrati nella tabella seguente:
| byte | Dati | Modulo | Risoluzione | Osservazioni |
| 1 | 0x5a | Uint8 |
|
|
| 2 | 0x5a | Uint8 |
|
|
| 3-6 | Tasso angolare x | galleggiante |
|
|
| 7-10 | Tasso angolare e | galleggiante |
|
|
| 11-14 | Tasso angolare z | galleggiante |
|
|
| Da 15 a 18 | Accelerazione x | galleggiante |
|
|
| 19-22 | Accelerazione y | galleggiante |
|
|
| 23-26 | Accelerazione z | galleggiante |
|
|
| 27-30 | Prenotato | Uint8 |
|
|
| 31 | Temperatura | US8 | 1 ℃ | Intervallo: da -128 a 127 |
| 32 | E controlla | Uint8 |
|
1-31 byte si sommano e prendi 8 bit inferiori |
Interfaccia strutturale
Tag caldi: Giroscopio in fibra ottica-mems di misurazione inerziale unità, produttori, fornitori, fabbrica, Cina, realizzato in Cina, personalizzato, di alta qualità
Categoria correlata
Invia richiesta
Non esitate a dare la vostra richiesta nel modulo sottostante. Ti risponderemo entro 24 ore.
prodotti correlati